Convergence in EIGRP
Convergence in an EIGRP network can be quite complicated. Part of this complexity is due to Cisco’s standard of supporting up to six parallel routes to all destinations. Although this standard has helped make Cisco the market leader in internetworking products, it makes it more difficult to explain internetworking topics.
Enhanced IGRP (EIGRP) convergence differs slightly. If a router detects a link failure between itself and a neighbor, it checks the network topology table for a feasible alternate route. If it does not find a qualifying alternate route, it enters in an active convergence state and sends a Query out all interfaces for other routes to the failed link. If a neighbor replies to the Query with a route to the failed link, the router accepts the new path and metric information, places it in the topology table, and creates an entry for the routing table. It then sends an update about the new route out all interfaces. All neighbors acknowledge the update and send updates of their own back to the sender. These bi-directional updates ensure the routing tables are synchronized and validate the neighbor’s awareness of the new topology. Convergence time in this event is the total of detection time, plus Query and Reply times and Update times.
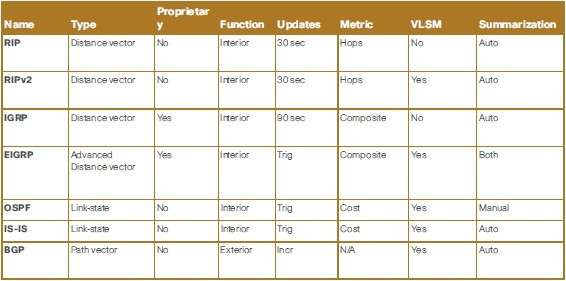
Fig: Details of Routing Protocols.
- Reported Distance and Feasibility Distance
Each EIGRP router uses its topology table to select the best route toward each destination in the table. The vector metric of the best route is reported to the router’s neighbors. The composite metric (or distance) of this route is called reported distance.
- Feasible Successor
The feasible successor is a router that is closer to the destination than the current router. A feasible successor is guaranteed not to be an upstream router of the current router. A neighbor is a feasible successor if it meets feasibility condition
- Feasible Distance
Feasibility distance is the minimum distance from the current router toward the destination since the last time a DUAL computation completed. A neighbor meets the feasibility condition if its reported distance is strictly lower than the feasibility distance.
- Convergence by dual when a route failure occurs
A successor is a neighboring router used for packet forwarding that has a least cost path to a destination that is guaranteed not to be a part of routing loop. Multiple successors can exist if they have the same FD. All successors are added to the routing table.
The next hope router for the backup path is referred to as the feasible successor FS. When the route loses a route, it looks at the topology table for an FS. If one exist , the route will not go into the active state , rather the best feasible successor will be promoted as the successor and will be installed in the routing table. When there are not feasible successors, a route will go into active state, and route computation occurs .
The next hope router must have an advertised distance less than the feasible distance of the current successor route . When there are no feasible successors but neighbors are advertising the destination , a recompilation must occur. Through this process, a new successor is determined, the amount of time that it takes ti recalculate the route affects the convergence time
Thanks for the terrific article